I’m a roboticist.
I completed a PhD at the Australian Centre for Field Robotics, University of Sydney in 2021.
My work focuses on how mobile robots can better interact with humans in the real world, merging computer vision perception, motion prediction and dynamic path planning.

My Work
Thesis
 Simultaneous Prediction and Planning in Crowds using Learnt Models of Social Response
Simultaneous Prediction and Planning in Crowds using Learnt Models of Social Response
S. Eiffert, “Simultaneous Prediction and Planning in Crowds using Learnt Models of Social Response,” Doctoral dissertation, University of Sydney, Australia, 2021.
paper
Field Robotics
 Resource and Response Aware Path Planning for Long-term Autonomy of Ground Robots in Agriculture
Resource and Response Aware Path Planning for Long-term Autonomy of Ground Robots in Agriculture
S. Eiffert, N. D. Wallace, H. Kong, N. Pirmarzdashti, and S. Sukkarieh, “Resource and Response Aware Path Planning for Long-term Autonomy of Ground Robots in Agriculture,” Accepted for publication in Field Robotics, 2021.
paper | video
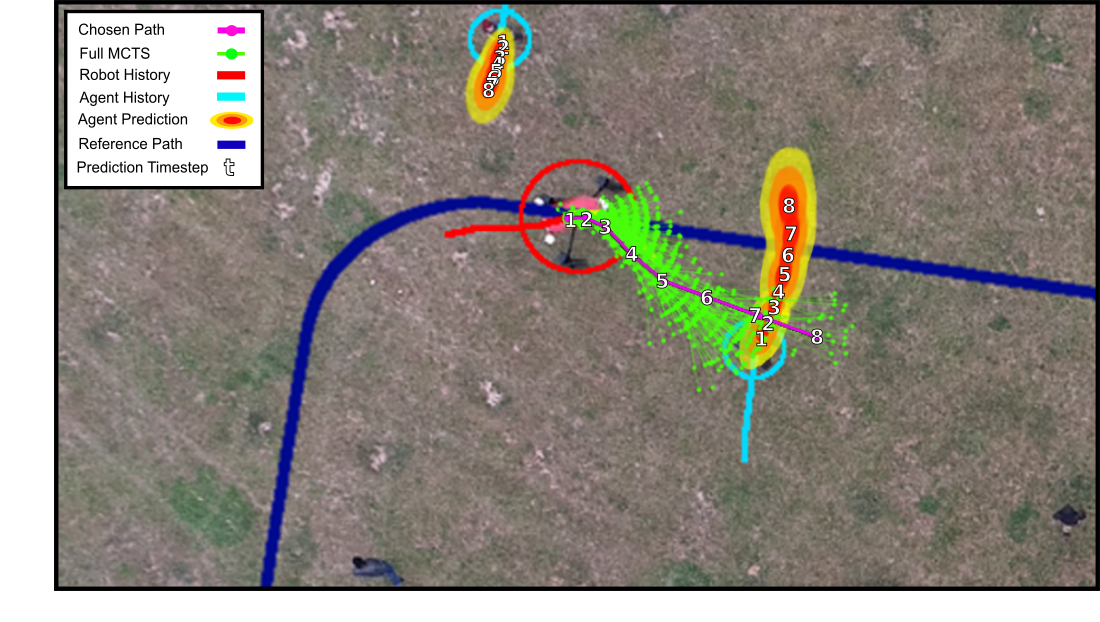
 Path Planning in Dynamic Environments using Generative RNNs and Monte Carlo Tree Search
Path Planning in Dynamic Environments using Generative RNNs and Monte Carlo Tree Search
S. Eiffert, H. Kong, N. Pirmarzdashti, and S. Sukkarieh, “Path Planning in Dynamic Environments using Generative RNNs and Monte Carlo Tree Search,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 10 263–10 269, 2020.
code | paper | video
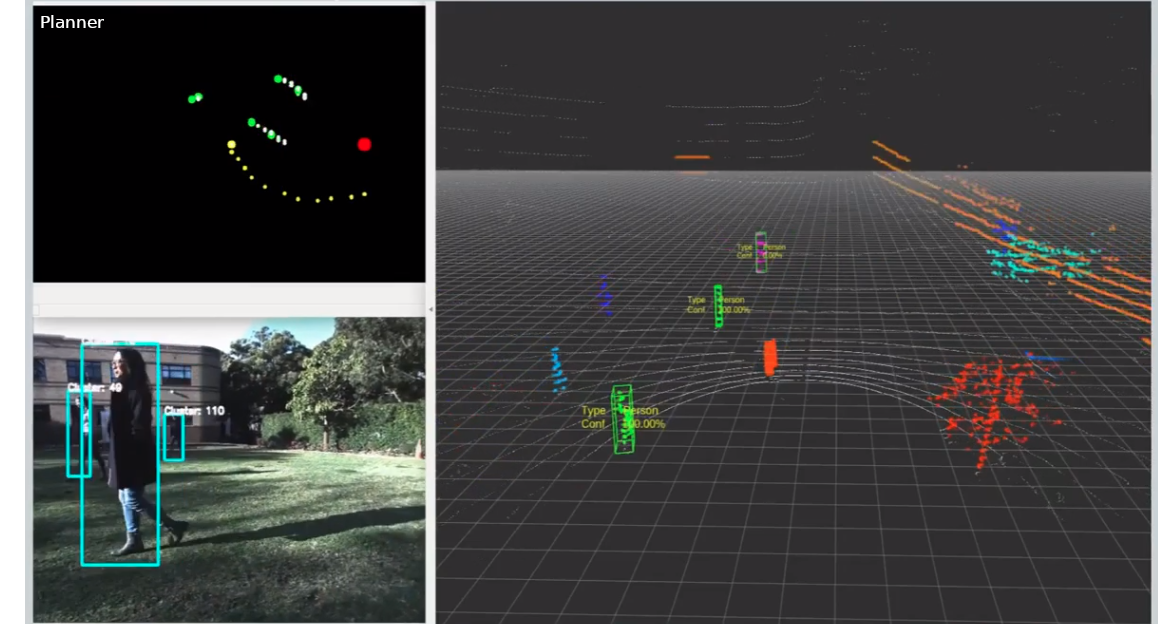
 Experimental Evaluation of a Hierarchical Operating Framework for Ground Robots in Agriculture
Experimental Evaluation of a Hierarchical Operating Framework for Ground Robots in Agriculture
S. Eiffert, N. D. Wallace, H. Kong, N. Pirmarzdashti, and S. Sukkarieh, “Experimental Evaluation of a Hierarchical Operating Framework for Ground Robots in Agriculture,” in 17th International Symposium on Experimental Robotics (ISER), 2020.
paper
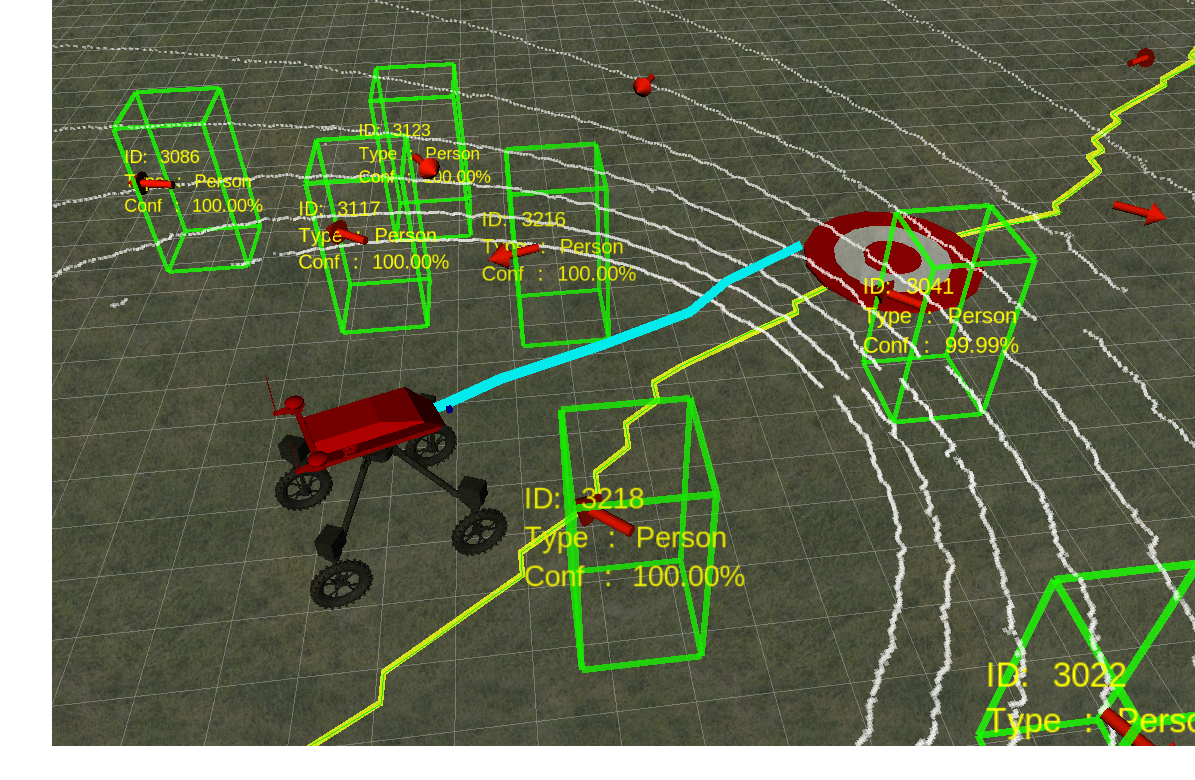 A Hierarchical Framework for Long-term and Robust Deployment of Field Ground Robots in Large-Scale Farming
A Hierarchical Framework for Long-term and Robust Deployment of Field Ground Robots in Large-Scale Farming
S. Eiffert, N. D. Wallace, H. Kong, N. Pirmarzdashti, and S. Sukkarieh, “A Hierarchical Framework for Long-term and Robust Deployment of Field Ground Robots in Large-Scale Farming,” in 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), pp. 948–954, 2020.
paper
Motion and Activity Prediction
 Attentional-GCNN: Adaptive Pedestrian Trajectory Prediction towards Generic Autonomous Vehicle Use Cases
Attentional-GCNN: Adaptive Pedestrian Trajectory Prediction towards Generic Autonomous Vehicle Use Cases
K. Li, S. Eiffert, F. Gomez-Donoso, M. Shan, S. Worrall, and E. Nebot, “Attentional-GCNN: Adaptive Pedestrian Trajectory Prediction towards Generic Autonomous Vehicle Use Cases,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), 2021.
paper
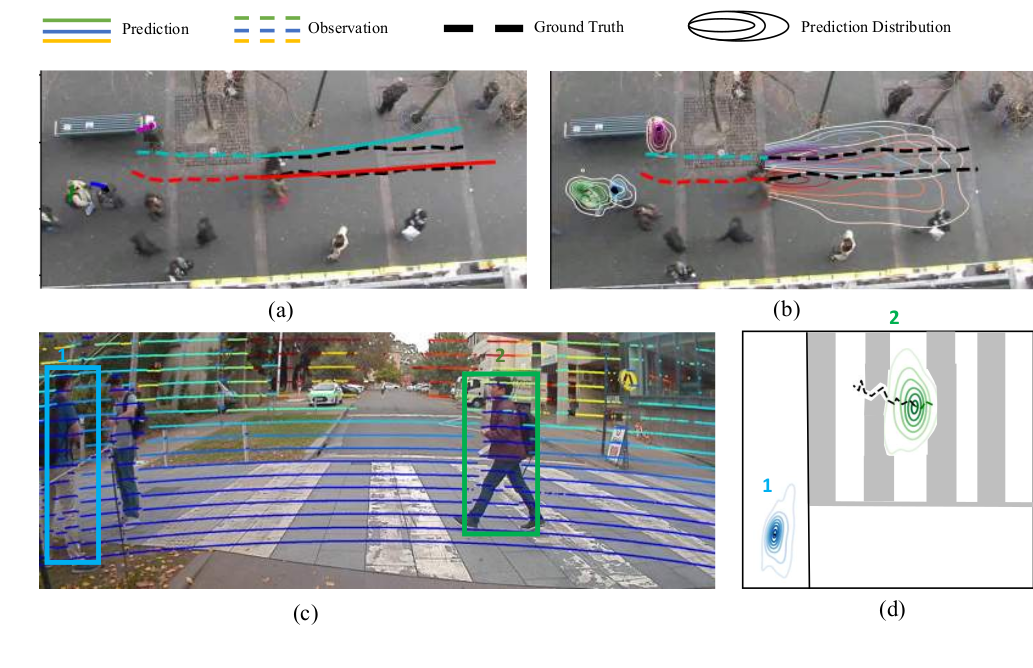
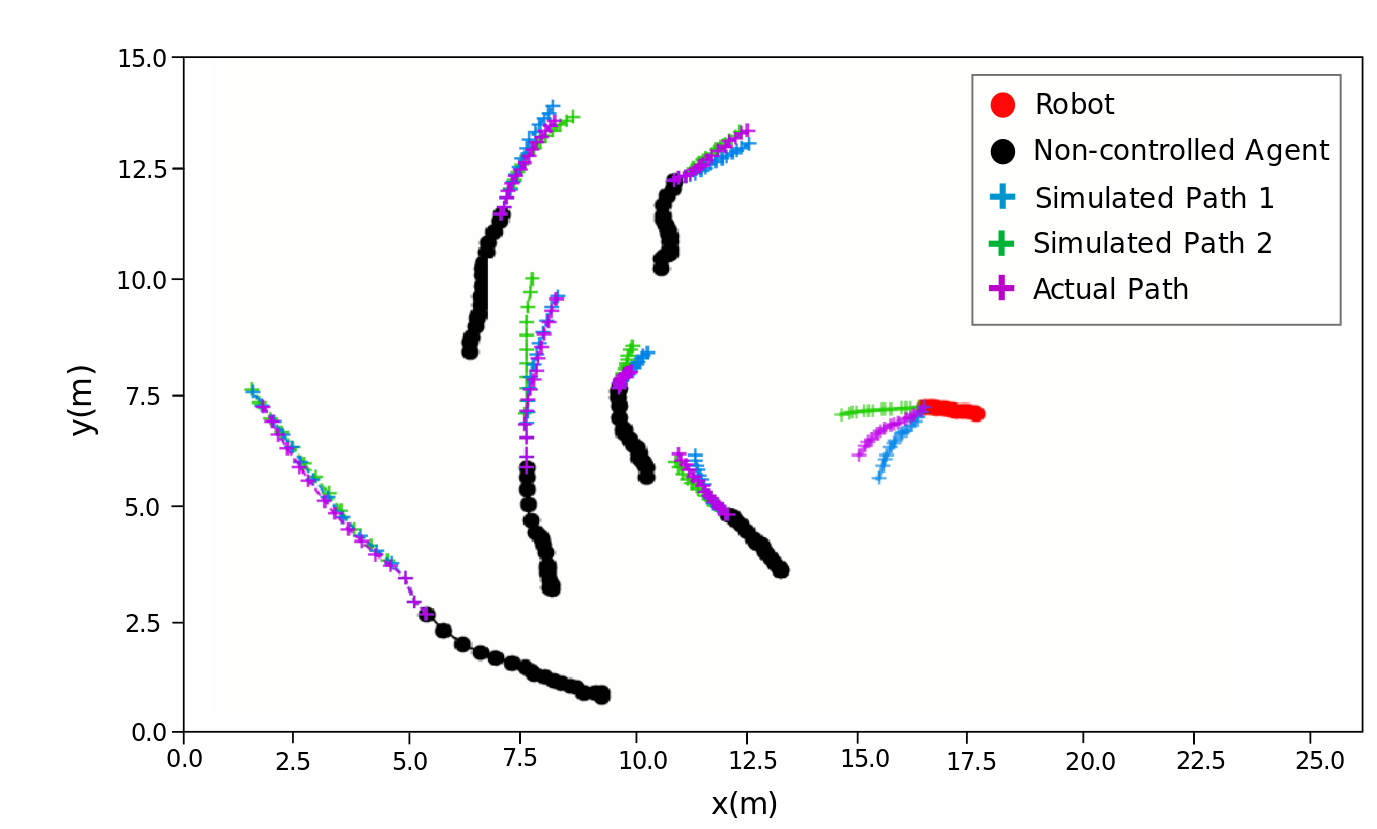
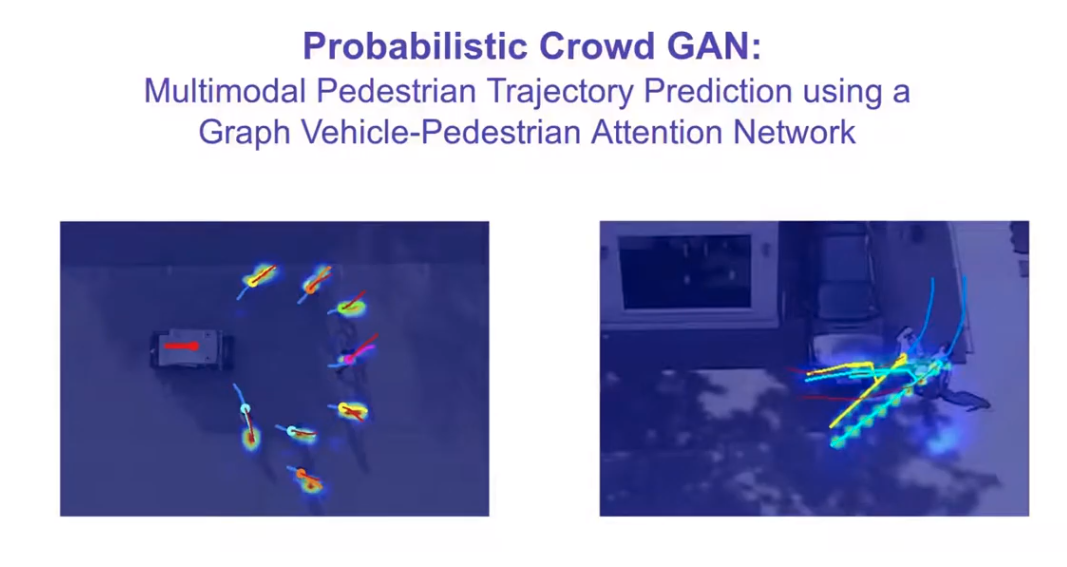 Probabilistic Crowd GAN: Multimodal Pedestrian Trajectory Prediction using a Graph Vehicle-Pedestrian Attention Network
Probabilistic Crowd GAN: Multimodal Pedestrian Trajectory Prediction using a Graph Vehicle-Pedestrian Attention Network
S. Eiffert, K. Li, M. Shan, S. Worrall, S. Sukkarieh, and E. Nebot, “Probabilistic Crowd GAN: Multimodal Pedestrian Trajectory Prediction using a Graph Vehicle-Pedestrian Attention Network,” IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 5026–5033, 2020.
paper | video
 Predicting Responses to a Robot’s Future Motion using Generative Recurrent Neural Networks
Predicting Responses to a Robot’s Future Motion using Generative Recurrent Neural Networks
S. Eiffert and S. Sukkarieh, “Predicting Responses to a Robot’s Future Motion using Generative Recurrent Neural Networks,” Proceedings - ARAA Australasian Conference on Robotics and Automation (ACRA), 2019.
paper
 Human Activity Recognition from 2D pose using RNNs
Human Activity Recognition from 2D pose using RNNs
Classification of human activities using a 2D skeletal pose time series dataset and an LSTM RNN. A proof of concept that using a series of 2D poses, rather than 3D poses or a raw 2D images, can produce an accurate estimation of the behaviour of a person or animal.
code
DrawnBetween
 DrawnBetween
DrawnBetween
DrawnBetween was a online multiplayer game built using image generation AI. It was hosted live for two years and had over 1000 games played during that time.
The full backend and frontend code for hosting it yourself is available at github.com/stuarteiffert/drawnbetween
Click below to see some of the images that the users created playing the game.